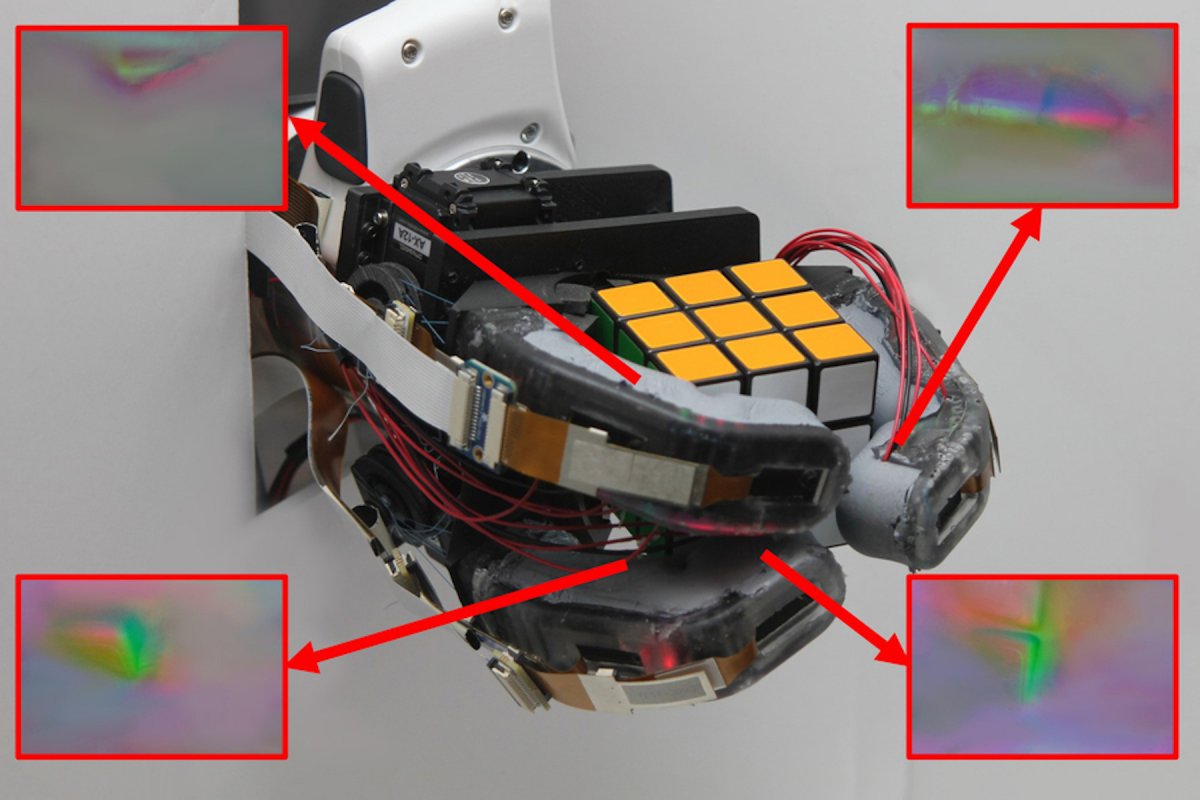
Scientists at Massachusetts Institute of Technology (MIT) have developed an artificial hand with high-resolution sensing capabilities that surpass those of the human hand. Traditional robotic hands have sensors confined to the fingertips, resulting in multiple grabs before the object can be fully recognised. MIT’s design, however, incorporates high-resolution sensing along the length of each finger, allowing objects to be recognised with just one touch. The hand is a three-fingered design with a rigid, 3D-printed endoskeleton surrounded by a soft, silicone skin. In addition, cameras and LEDs provide visual information about the shape of the grasped object.
The hand achieved 85% recognition accuracy with just one grip and thanks to its combination of soft and rigid elements, is capable of handling both heavy and fragile objects. It is therefore well-suited to care robots, which require both lifting capabilities and sensitivity.
Moving forward, the researchers plan to add a sensory palm, improve the thumb and reduce the wear and tear of the silicone. The study, “A Soft Endoskeleton Hand with Continuous High-Resolution Tactile Sensing”, will be presented at the RoboSoft 2023 robotics conference in Singapore.



{kind=link}