A research team from the Georgia Institute of Technology has developed a motion model that controls the locomotion of multi-limbed robots. This multi-legged motion model helps robots move better in difficult terrain with their redundant legs. The team theorized that adding pairs of legs increases a robot’s ability to move robustly over rough terrain, a concept called “spatial redundancy.” It allows the robot legs to move successfully without the need for sensors to sense their surroundings.
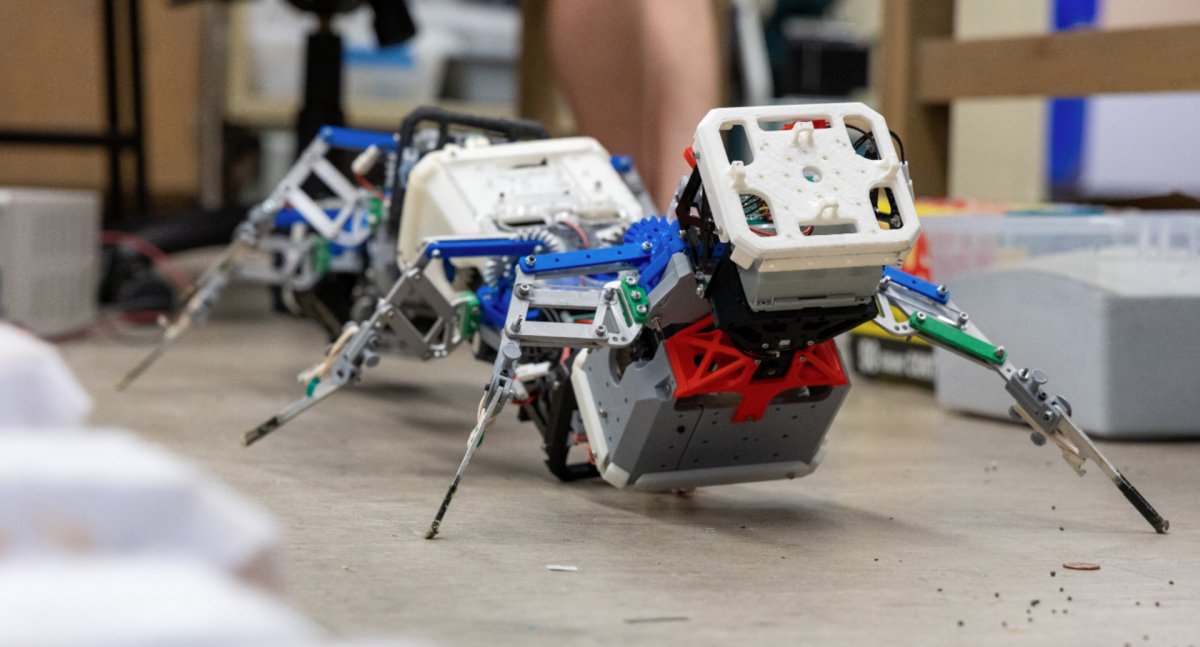
The benefits of this model are clear. A modern two-legged robot requires many sensors, but in applications such as search and rescue, exploration of Mars, or even microrobots, there is a need to control a robot with limited sensor capabilities. Sensors can also be expensive and sensitive, and the environment can change so quickly that the response time of the sensor and controller is insufficient. In a “non-uniform natural environment,” the researchers tested a robot in the laboratory. They gave him six to 16 legs one after the other – each one raised by a pair of legs.
With an increasing number of legs, the robot moved more nimbly through the terrain without sensors, thus confirming the theory of “spatial redundancy.” The robot also showed the same success in natural terrain in field tests. Whereas two-legged and four-legged robots rely heavily on sensors to traverse complex terrain, this multi-legged robot takes advantage of leg redundancy and can handle similar open-loop tasks.
The scientists plan to further develop the robot, but they have not figured out the optimal number of legs yet. However, they expect it to be cost-effective locomotion without sensors. To do this, however, the scientists must first understand the trade-offs between energy, speed, performance, and robustness.
Professor Daniel Goldman plans to use this robot on agricultural fields. He founded a company that wants to use the robots for ecologically correct weed control. The multi-legged motion model has great potential to transform the field of robotics, and it will be exciting to see what applications it will be used for in the future.



{kind=link}